Nie zuvor wurde ein Navigationscomputer für den Betrieb im Flug entwickelt, der einen derart umfangreichen Funktionsumfang hatte, wie der AGC ihn erhalten sollte. Bereits die Block I Version, die auf den unbemannten Flügen eingesetzt wurde, hatte ein großes Aufgabengebiet, inklusive Ein- und Ausgabe für den – auf den unbemannten Flügen natürlich nicht vorhandenen – Astronauten.
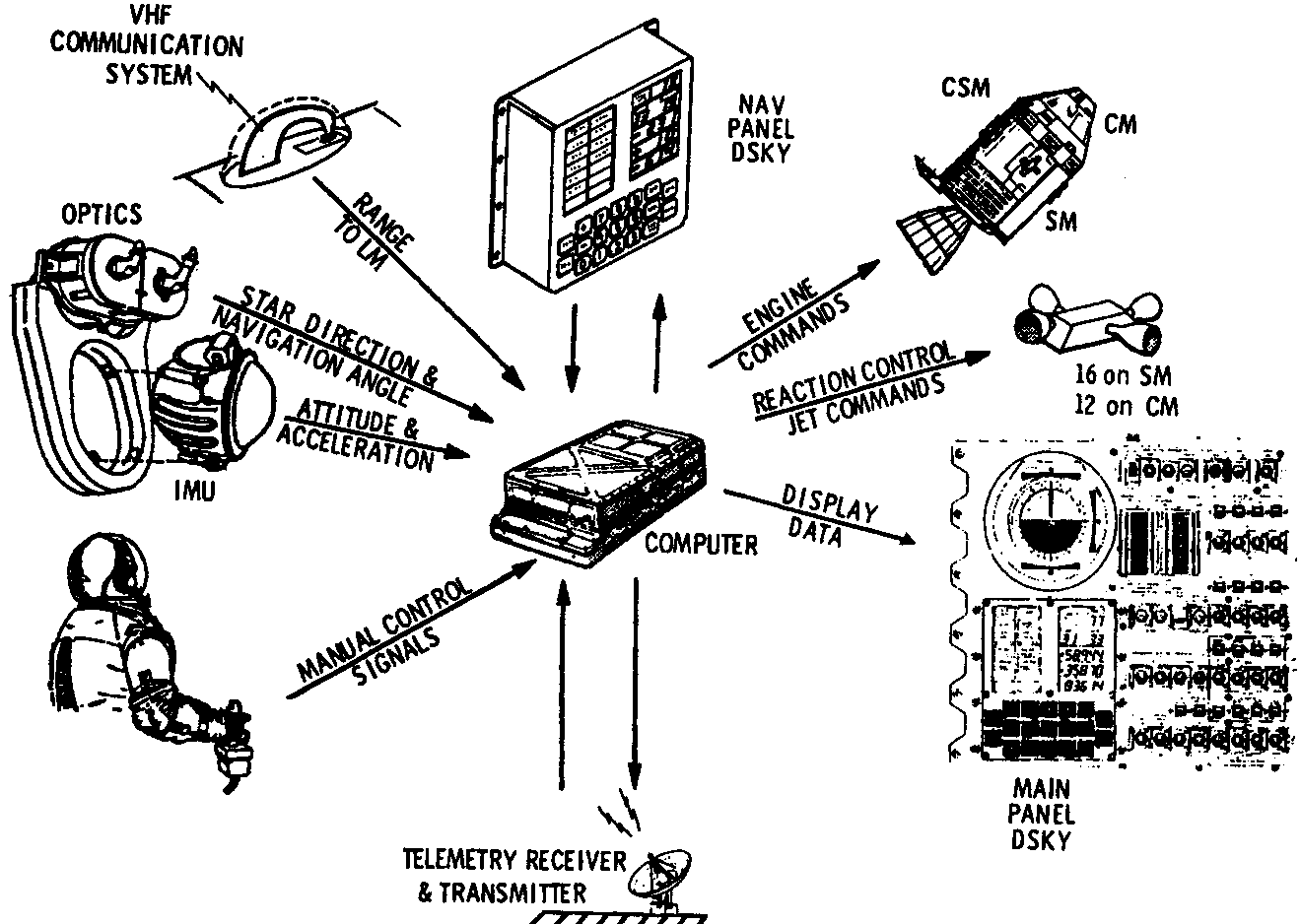
In der Block II Version kam dann noch die Steuerung der VHF-Kommunikation und die direkte Steuerung der RCS-Thruster (Reaction Control System) hinzu.
Systemschnittstellen AGC Block II [HAL1996, S. 67]
Aus der Abbildung ist auch ersichtlich, dass die manuelle Steuerung ebenfalls über den AGC läuft und somit keineswegs unabhängig vom Computer ist. Die Architektur des AGC lässt sich in sieben Bereiche unterteilen: Zeitgeber (timer) - für Synchronisierungsimpulse Sequenzgenerator (sequence generator) - regelt die Ausführung der Maschineninstruktionen durch Steuerimpulse Zentralprozessor (central processor) - Berechnungen Speicher (memory) - aufgeteilt in Festspeicher und beschreibbaren Speicher
Prioritätensteuerung (priority control) - Steuerung der Prioritäten einzelner Operationen Ein/Ausgabe Energieversorgung (power) - 4-Volt- und 14-Volt-Zufuhr von Brennstoffzellen Bei der AGC-Architektur handelt es sich also um eine Von-Neumann-Architektur. Der AGC war zwar speziell für die Navigation im Weltraum konzipiert worden, war aber dennoch ein Allzweckrechner, der unterschiedlichste Funktionen übernehmen konnte, wie z.B. die Übernahme der Steuerung der Saturn V oder die Durchführung von Missionsabbrüchen, welche je nach aktueller Flugphase unterschiedliche Anforderungen an das System stellten. Darüber hinaus bildet die Prioritätensteuerung ein auch heute noch aktuelles Scheduling-Verfahren, das in den 1960er-Jahren nicht nur hoch modern war, sondern auch nie zuvor für einen Navigationscomputer in einem Flugzeug oder Raumschiff eingesetzt worden war. Es gab vorher schlicht keine Computer, die zum einen leistungsfähig genug für die Navigation im Weltraum, zum anderen derart kompakt gebaut wie der AGC waren. Die folgende Übersicht zeigt die technischen Daten des AGC Block II, also der Version, die in den bemannten Flügen zum Einsatz kam: Technische Daten des AGC (Überblick), nach [HAL1996, Kapitel 1] Neben der technischen Leistungsfähigkeit und der kompakten Bauweise musste der AGC natürlich auch die enormen physischen Belastungen des Starts in der Saturn V problemlos überstehen. Dies wurde zum einen durch stabile Umhüllungen des AGC, zum anderen durch äußerst robuste Bauteile erreicht. So basierte z.B. der Festspeicher, der sämtliche Navigationsprogramme enthielt, auf einer innovativen Technologie, die es ermöglichte, sehr stabilen Speicher mit dennoch geringem Volumen bzw. hoher Speicherdichte zu bauen.
Aufgaben des Apollo Guidance Computers
Taktfrequenz
1,024 MHz
Taktgeber: Quarzoszillator mit 2,048 MHz
Signalteilung für Mehrphasentakt
Wortlänge
16 Bits
Memory cycle time
11,7
RAM
2.048 Words
ROM
36.864 Words
Maschineninstruktionen
34 reguläre + extended
Prioritäten Interrupts
11
Additionszeit
23.4 us
Multiplikationszeit
46.8 us
Input/Output
227 Circuits
Integrated Circuits
5.600
Energiebedarf
55 Watt
Gewicht
31,8 kg
Volumen
27,5 l